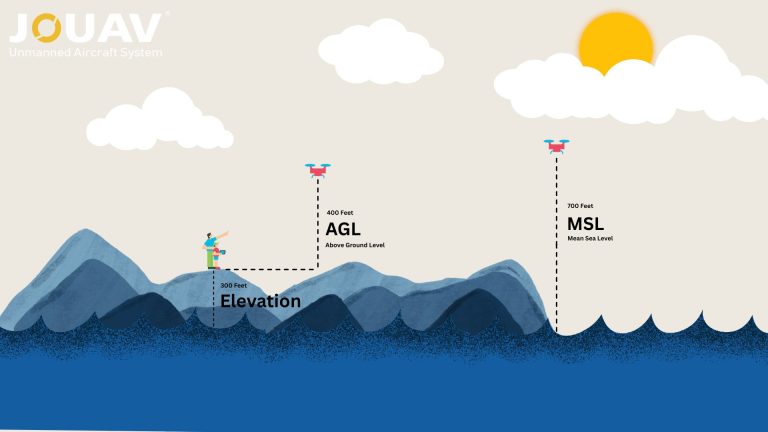
In aviation, precision isn’t just a goal—it’s a necessity. Every altitude reading, flight path, and safety protocol hinges on understanding two critical measurements: Mean Sea Level (MSL) and Above Gr
What is an AHRS (Attitude and Heading Reference System)?
An Attitude and Heading Reference System (AHRS) is a cutting-edge avionics or navigation system that calculates an object's precise orientation in three-dimensional space. At its core, an AHRS answers a critical question: "Which way is up, and where am I pointing?"
By combining data from multiple sensors, it delivers real-time measurements of pitch (tilt up/down), roll (tilt sideways), and yaw (rotation left/right), along with magnetic heading.
This technology is vital for applications where spatial awareness is non-negotiable—such as stabilizing aircraft in turbulence, guiding drones through obstacle courses, or ensuring autonomous vehicles stay on track.

How Does AHRS Work?
An AHRS operates by continuously integrating data from multiple sensors to determine a vehicle's orientation accurately and in real time.
Sensor Data Collection
Gyroscopes
These sensors measure angular velocities around the three axes. They provide rapid, high-frequency data about rotational motion, which is critical for tracking changes in the vehicle's orientation. However, gyroscopes alone suffer from drift, meaning small errors can accumulate over time.
Accelerometers
Accelerometers measure linear acceleration, including the effect of gravity. They help determine the orientation of a vehicle relative to the Earth's surface, particularly for sensing static angles like pitch and roll. Nonetheless, external forces can affect accelerometer readings, making them less reliable during dynamic maneuvers.
Magnetometers
These sensors function as electronic compasses by detecting the Earth’s magnetic field. They offer an absolute reference for the vehicle’s heading (yaw). However, magnetometers are prone to interference from nearby electronic devices or ferrous materials, which can skew the readings.
Sensor Fusion and Data Processing
To overcome the limitations inherent in the individual sensors, AHRS employs sensor fusion algorithms. One of the most effective and widely used approaches is the Kalman filter, though other advanced algorithms can also be applied. Here’s how the process works:
Kalman Filter Implementation
The Kalman filter takes in the raw, noisy sensor data and produces optimal estimates of the system's state by weighing each sensor’s contribution according to its reliability. It continuously predicts the system’s current state based on previous measurements and then updates this prediction using new sensor data. This mathematical model mitigates errors such as drift from gyroscopes and transient inaccuracies from accelerometers and magnetometers.
Real-Time Data Correction
As the vehicle moves, the system constantly recalculates its orientation. The sensor fusion algorithm compares the predicted sensor readings with the actual measurements and applies corrections to maintain an accurate and stable output. This correction loop is essential during rapid maneuvers, ensuring the system remains responsive and accurate under changing conditions.
Output: 3D Orientation
The final output of an AHRS is a precise estimation of the vehicle’s orientation in three dimensions:
- Pitch (Nose Up/Down): Determined by analyzing the distribution of gravitational acceleration as measured by the accelerometers, supported by gyroscopic data.
- Roll (Tilt Left/Right): Also derived from accelerometer data that detects lateral changes, refined with information from the gyroscopes.
- Yaw (Heading): Primarily measured by the magnetometers but stabilized using the dynamic data from the gyroscopes to provide a smooth transition between heading changes.
Diagram Suggestion and Practical Integration
For better clarity, many technical resources suggest visual diagrams that map out the flow from sensor input to the final output. A typical diagram might show a flowchart starting from the collection of raw data from the gyroscopes, accelerometers, and magnetometers, proceeding to the Kalman filter or another sensor fusion algorithm, and ending with the output of the three-dimensional orientation.
Enhanced Stability and Accuracy
By integrating and processing data from multiple sensors, the AHRS mitigates the limitations of each sensor. This synergistic approach allows the system to offer a robust and reliable solution for orientation tracking, crucial in applications where precision and stability are critical—such as in modern aviation, unmanned aerial vehicles (UAVs), marine navigation, and robotics.
Applications of AHRS Across Industries
The Attitude and Heading Reference System (AHRS) is a marvel of modern engineering, blending hardware and software to deliver real-time 3D orientation data. But how does it transform raw sensor readings into precise pitch, roll, and yaw angles?

Aviation
AHRS is the backbone of modern avionics, enabling aircraft to navigate safely through turbulence, low visibility, and complex airspace.
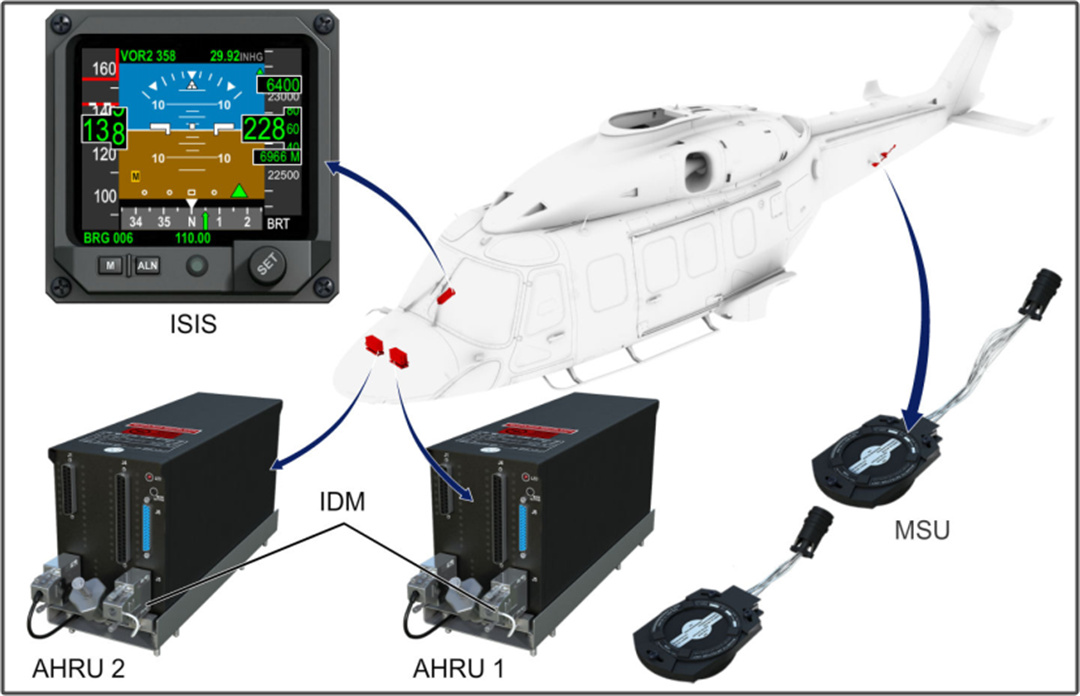
- In-Flight Stability: By providing real-time pitch, roll, and yaw data, AHRS feeds critical information to cockpit displays like the Primary Flight Display (PFD), helping pilots maintain spatial awareness during storms or night flights.
- Autopilot Integration: Commercial jets and helicopters use AHRS to automate maneuvers, such as altitude holds or coordinated turns, reducing pilot workload and enhancing fuel efficiency.
In Boeing’s 787 Dreamliner, AHRS works alongside air data computers to form an Air Data and Attitude Heading Reference System (ADAHRS), delivering integrated metrics like altitude, airspeed, and orientation.
Drones and UAVs
From delivery drones to agricultural monitors, AHRS empowers unmanned aerial vehicles (UAVs) to execute precision tasks.
- Stabilization in Wind: AHRS compensates for sudden gusts by adjusting motor speeds, ensuring smooth footage for aerial photography or surveying.
- Obstacle Avoidance: Integrated with LiDAR and cameras, AHRS enables drones to map environments in 3D, critical for search-and-rescue missions or infrastructure inspections.
- Autonomous Missions: Agricultural drones leverage AHRS-guided flight paths to spray crops with millimeter accuracy, optimizing pesticide use.

Maritime Navigation
In marine environments, AHRS ensures vessels stay on course, even in GPS-denied or stormy conditions.
- Dynamic Positioning: Offshore oil rigs use AHRS t o stabilize cranes and thrusters, maintaining position despite waves and currents.
- Submarine Navigation: Submarines rely on AHRS for stealthy underwater navigation, where GPS signals are inaccessible and magnetic interference is common.
Cruise ships employ AHRS in automated steering systems to plot efficient routes while minimizing fuel consumption.
Autonomous Vehicles
Self-driving cars and rovers depend on AHRS to “see” their orientation when traditional sensors fail.
- Tunnel Navigation: AHRS provides continuous heading data in GPS-blind zones, such as tunnels or urban canyons, ensuring seamless lane-keeping.
- Sensor Fusion: Combined with radar and cameras, AHRS helps autonomous vehicles detect icy roads by correlating wheel slippage with vehicle tilt.
Robotics
From factory floors to disaster zones, robots leverage AHRS for tasks demanding split-second accuracy.
- Industrial Arms: Robotic arms in manufacturing use AHRS to align components during assembly, reducing error margins in industries like semiconductor production.
- Warehouse Logistics: Autonomous mobile robots (AMRs) navigate crowded warehouses using AHRS to track turns and avoid collisions.
Defense and Aerospace
Military systems demand rugged, fail-safe navigation—a niche where AHRS excels.
- Military Drones: AHRS-guided UAVs perform reconnaissance in GPS-jammed environments, using magnetometers to maintain heading.
- Missile Guidance: Tactical missiles use AHRS for mid-course corrections, ensuring trajectory accuracy even without external signals.
- Space Exploration: Next-gen AHRS with quantum sensors are being tested for lunar rovers, where Earth’s magnetic field is absent.
How to Choose the Right AHRS System?
Whether you’re designing an autonomous drone, retrofitting a marine vessel, or building a cutting-edge robotics platform, the wrong choice can lead to costly errors, safety risks, or system failures.

1. Define Your Application Requirements
Every AHRS is engineered for specific use cases. Start by answering these questions:
What environment will it operate in?
- Aviation: Prioritize systems compliant with FAA/EASA standards.
- Marine: Look for waterproofing (IP67+) and corrosion resistance.
- Industrial: Ensure EMI shielding for factories or power plants.
- Space/Defense: Seek radiation-hardened or MIL-STD-810G-certified units.
What level of accuracy is non-negotiable?
- High-precision aerospace systems may require <0.1° error in pitch/roll.
- Consumer drones often tolerate 1–2° errors but need rapid update rates (200+ Hz).
How critical is redundancy?
For GPS-denied environments (e.g., submarines), prioritize AHRS with dual magnetometers or GNSS backup interfaces.
2. Evaluate Core Technical Specifications
Focus on three critical technical elements:
- Sensor Quality: MEMS-based systems are affordable and lightweight, making them ideal for consumer drones, while fiber-optic gyroscopes (FOG) offer superior accuracy for aerospace or defense.
- Sensor Fusion Algorithms: Kalman filters are standard, but AI-driven systems excel in dynamic environments like autonomous vehicles navigating urban areas.
- Durability: Ensure the AHRS can operate within your environmental conditions. For example, oil rig equipment requires systems rated from -40°C to 85°C and high vibration resistance.
Integration capabilities are equally vital. Verify compatibility with communication protocols (e.g., CAN bus, SPI) and software ecosystems like ROS (Robot Operating System) to avoid costly retrofitting.
3. Consider Size, Weight, and Power
The physical and operational footprint of the AHRS directly impacts performance. In aerospace or drone design, every gram matters—nano AHRS units under 50 grams reduce battery drain and extend flight times.
Conversely, industrial systems might prioritize robustness over miniaturization, opting for larger housings with enhanced shielding against electromagnetic interference.
Power consumption is another key factor: wearable tech or IoT devices often require sub-1W systems to preserve battery life.
4. Analyze Total Cost of Ownership
While upfront costs are a consideration, long-term expenses like calibration, maintenance, and upgrades often determine ROI.
A $10,000 FOG-based AHRS might seem expensive initially, but its slower drift and infrequent calibration needs could save thousands annually in aviation.
Conversely, a 300 MEMS unit for a hobbyist drone offers adequate performance without unnecessary features.
Factor in hidden savings, too: a lightweight AHRS on a delivery drone can reduce energy use, enabling longer missions and higher payload capacity.
5. Verify Certifications and Compliance
Industry-specific certifications ensure reliability and legality.
Aviation systems must meet FAA or EASA standards, marine units require IMO compliance, and industrial AHRS in hazardous environments need ATEX or IECEx certifications.
Non-compliance risks operational shutdowns, fines, or safety failures—especially in regulated sectors like defense or aerospace.
6. Test Real-World Performance
Before committing, validate the AHRS under conditions mimicking your operational environment:
- Dynamic Testing: Simulate rapid maneuvers (e.g., drone flips, ship rolls) to check latency and drift.
- Failure Modes: Disable GPS or introduce magnetic interference to test redundancy.
- Long-Duration Trials: Run 24/7 tests to assess thermal drift or memory leaks.
7. Avoid Common Pitfalls
Beware of vendors overpromising accuracy for their price range—a $500 MEMS AHRS claiming <0.5° error is likely misleading.
Similarly, avoid proprietary systems that lock you into exclusive software, limiting future scalability.
Finally, prioritize vendors offering robust calibration tools and support; systems requiring frequent manual recalibration inflate long-term costs.
Read More

So, you’re wondering if you can fly your drone in the rain. The answer is generally a resounding NO. Most drones—especially consumer models like the DJI Mini or Air series—aren’t waterproof.
Rai

With their six-propeller design, hexacopters stand out for their stability, payload capacity, and flight redundancy. This makes them a powerful choice for aerial photography, precision agriculture, in

JOUAV Product News and Use Cases
Fixed-Wing VTOL Drones Insights and Industry Trends
Invitations to online demo events